Shape-shifting wheels inspired by liquid surface tension could revolutionize all-terrain navigation

Researchers from Korea Institute of Machinery and Materials have developed a next-gen wheel system that adapts its stiffness in real-time, inspired by the surface tension properties of liquid droplets - making it a first-of-its-kind design. It offers a promising solution to the long-standing challenge of balancing speed and obstacle navigation in robotic and transportation systems.
Now, the concept of variable-stiffness wheels and adaptive mobility systems isn't particularly new, especially in robotics and vehicular applications. However, what makes this technology unique is its specific surface tension-inspired mechanism, which allows for real-time adjustment of wheel stiffness and shape.
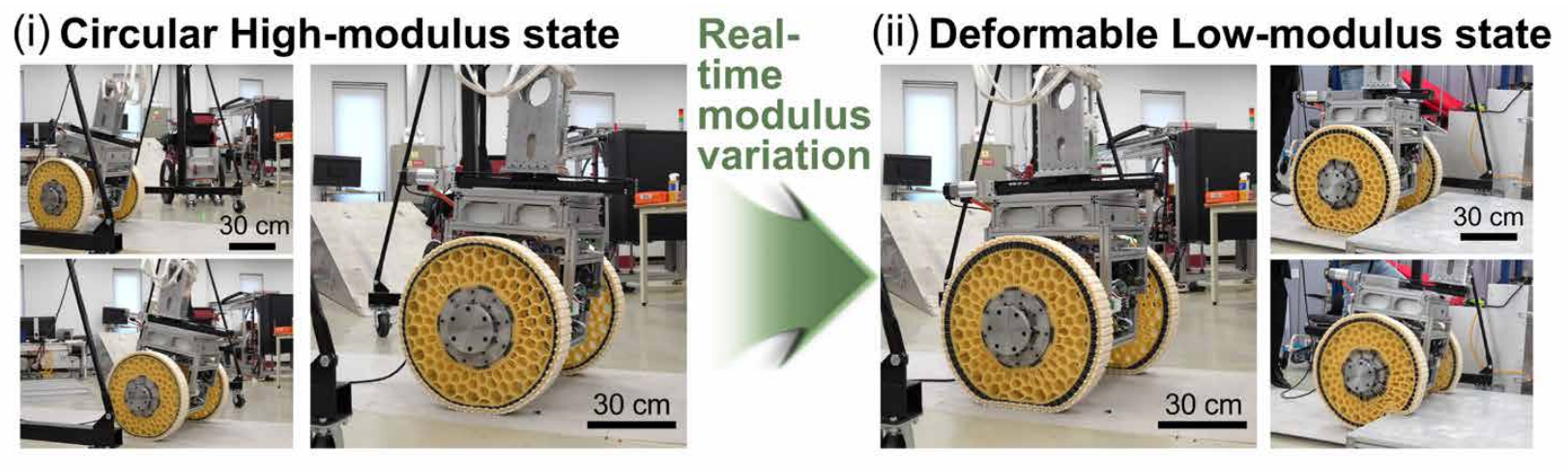
Traditional wheels are efficient on flat surfaces but struggle with obstacles, which often leads to a trade-off between mobility and stability. To address this, the team designed a "variable-stiffness–morphing wheel" that can transition between a rigid, circular shape for high-speed movement and a soft, deformable state for navigating rough terrain.
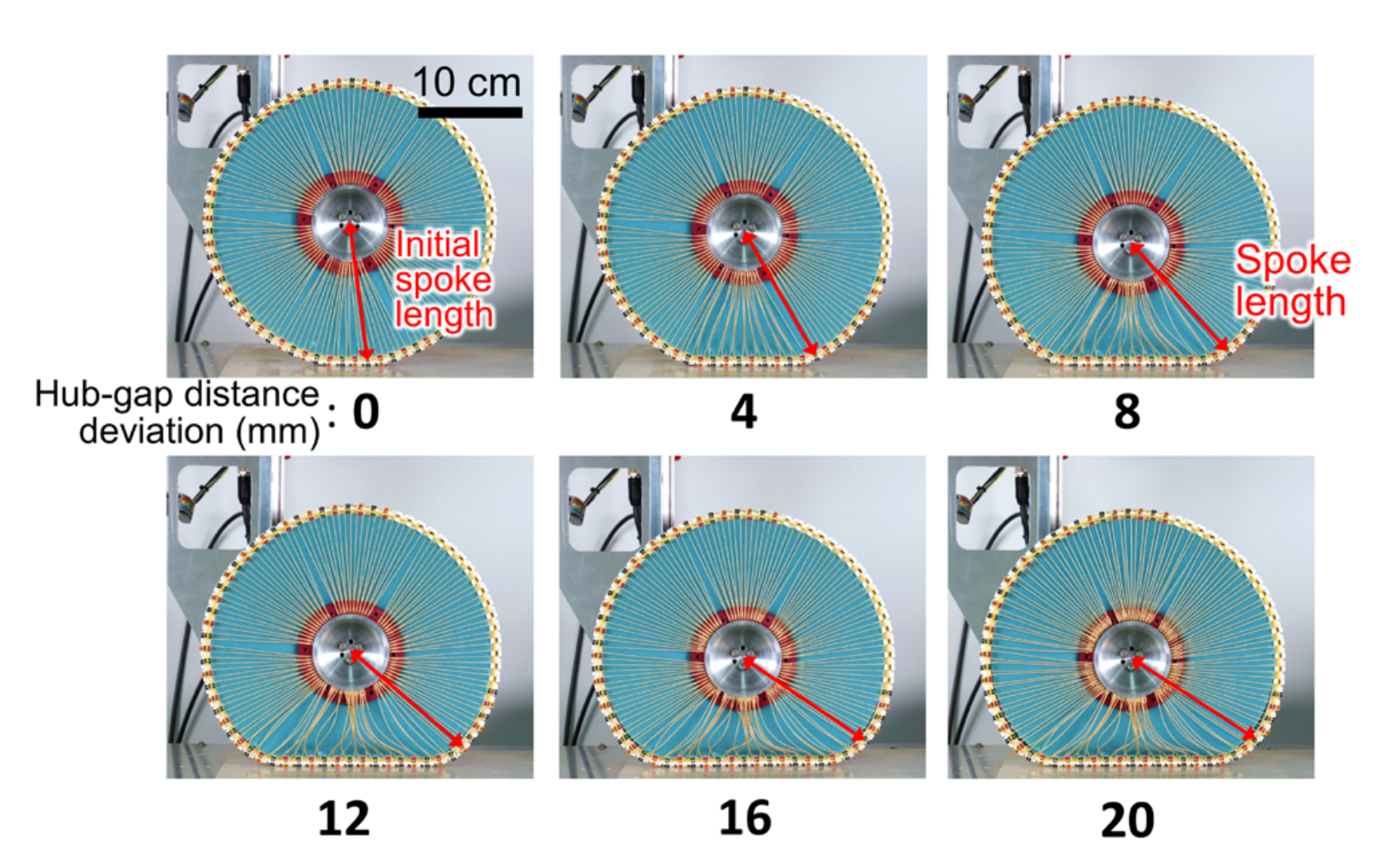
By adjusting the tension in wire spokes connected to a smart chain structure around the wheel, the wheel's stiffness and shape can be controlled. This allows it to maintain its shape on smooth surfaces and deform to adapt to obstacles. It's just like how surface tension pulls a liquid droplet back to its circular form.
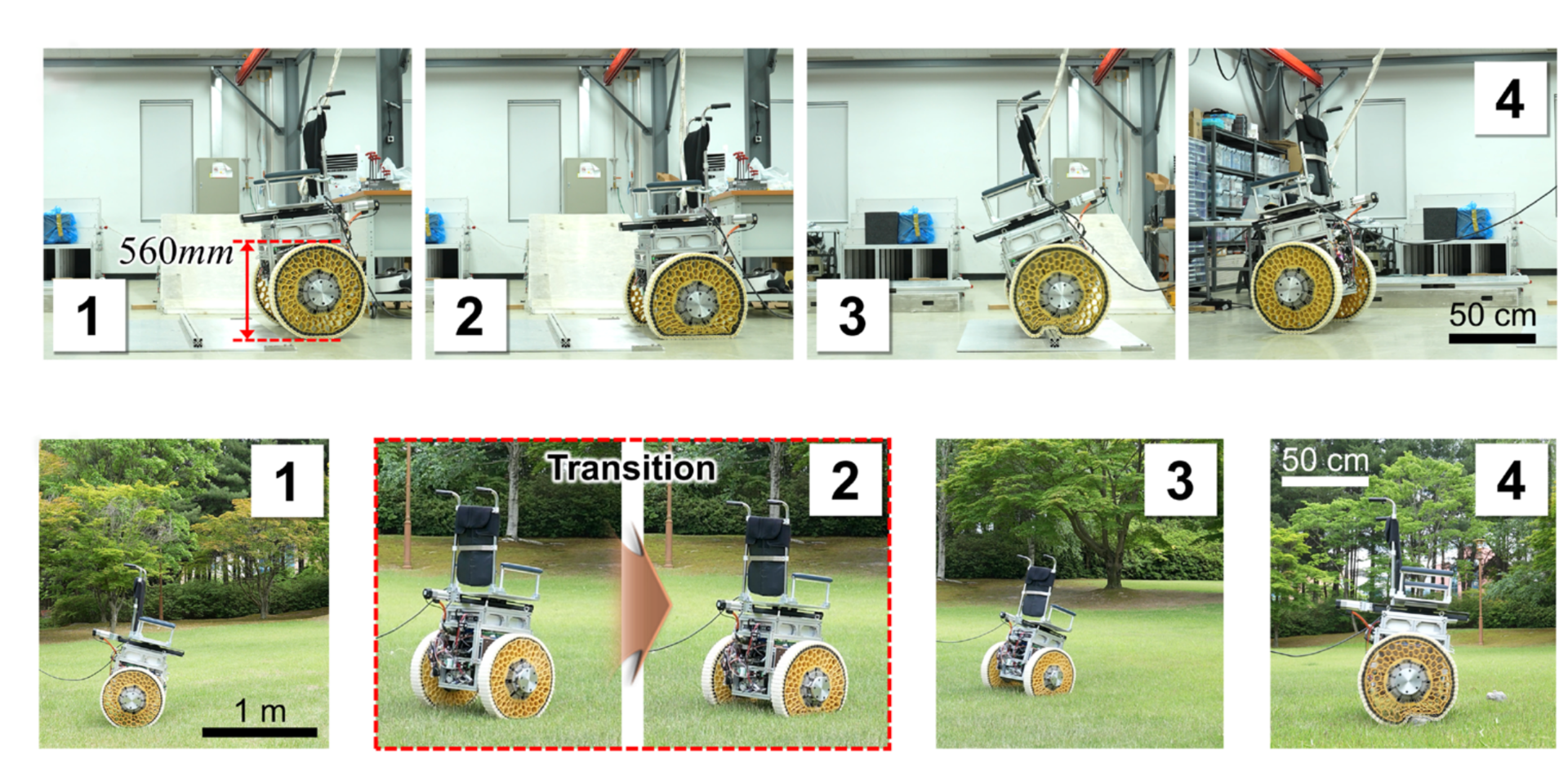
Tests with a two-wheeled wheelchair system showed the wheel's ability to switch between states in real-time, making it capable of climbing over obstacles up to 40% of its radius. It's already quite an improvement over traditional wheels and offers potential applications in various mobile systems, including robotics and vehicles.
The research paper also mentions future enhancements, such as improving the wheel's durability and integrating it into more complex systems. All-in-all, this wheel could be a solid upgrade to how robots and vehicles navigate challenging environments. For instance, it could upgrade the mobility of all-terrain robots, making them better suited for search and rescue missions in disaster zones. It could also improve the performance of off-road vehicles and wheelchairs, enabling them to traverse uneven surfaces and obstacles with greater ease and stability.
Source(s)
Newswise and Science.org
